直流电机的闭环调速系统
反馈控制的闭环系统是按被调量的偏差进行控制的系统,只要被调量出现偏差,它就会自动产生纠正偏差的作用
调速系统的转速降落正是由负载引起的转速偏差
引入转速闭环将使调速系统应该能够大大减少转速降落
基本原理
采用转速负反馈的闭环调速系统
系统组成:
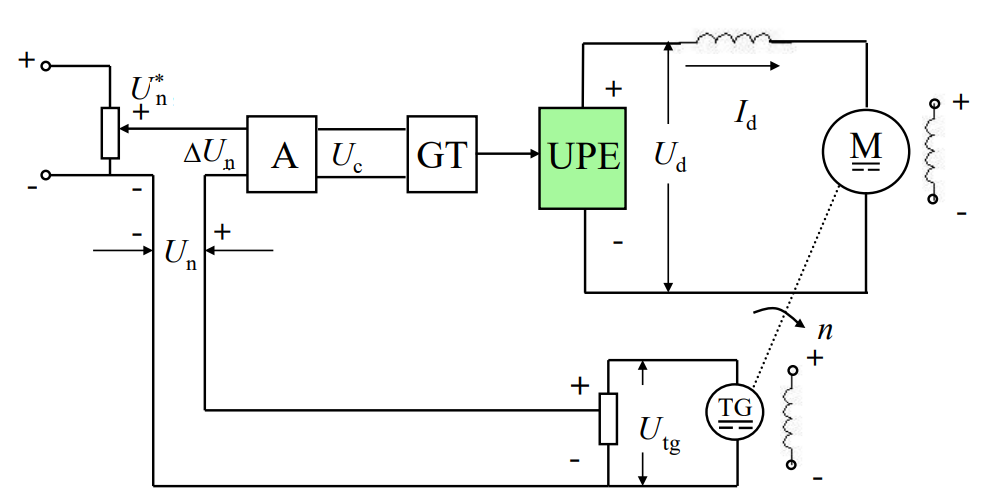
在反馈控制的闭环直流调速系统中,
与电动机同轴安装一台测速发电机 TG,从而引出与被调量转速成正比的负反馈电压
与给定电压
经过运算放大器 A,产生控制电压
控制触发装置 GT,产生控制电压给 电力电子变换器 UPE
提供可控的直流电压
稳态关系
静特性:
闭环调速系统电动机转速与负载电流(或转矩)间的稳态关系,
它在形式上与开环机械特性相似,但本质上却有很大不同
电压比较环节:
运算放大器:
电力电子变换器:
调速系统开环机械特性:
直流电机的开环调速
测速反馈环节:
静特性方程
从上述五个关系式中消去中间变量,整理后,即得转速负反馈闭环直流调速系统的静特性方程
静特性方程式:
稳态结构框图:
-
仅考虑给定作用
-
仅考虑扰动作用
两者线性叠加,即得到静特性方程
闭环调速的过程
闭环调速系统可以获得比开环调速系统 硬得多的稳态特性
-
开环系统
-
闭环系统
由此看来,闭环系统能够减少稳态速降的实质在于反馈,能随着负载的变化而相应地改变电枢电压,以补偿电枢回路电阻压降
直流反馈控制规律
反馈 有静差调速系统
可能存在的扰动作用:
- 反馈控制系统对被反馈环包围的前向通道上的扰动都有抑制功能
- 测速反馈系数出现误差,它反而会增大被调量的误差
电机稳态方程:
电路方程
电磁力
力矩平衡(运动方程)
UPE:
电力电子变换器
功率器件、执行机构、功率驱动装置
开环
闭环
稳态特性:
转速下降变小
机械特性变硬