模拟式PID控制器
基本概述
偏差 = 测量值 - 给定值
输出信号变化量
控制器之间的干扰系数:
一、P 运算规律
比例度
单独的比例作用一定会存在余差,比例作用
二、PI 运算规律
积分作用可以消除余差:只要偏差存在,积分作用输出就会随时间不断变化直到偏差消除。
但是积分输出是随时间累计改变的,控制动作缓慢,可能造成控制不及时,使得稳定裕度下降。
2.1 理想 PI 控制器
积分时间
积分时间越短,积分速度越快、积分作用越强。
2.2 实际 PI 控制器
积分增益
- 控制点偏差:
PI 控制器不可能完全消除余差 - 控制精度:
控制点最大偏差的相对变化值
控制精度表征消除余差的能力,
或 越大,控制精度越高,消除余差的能力越大。
不能完全消除余差:因为积分增益为有限值。
三、PD 运算规律
微分作用按偏差变化速度进行控制,只要有变化趋势,就有控制作用输出。
超前控制,可以改善控制过程的动态特性。噪声过大的系统不宜单独使用。
3.1 理想 PD 控制器
微分时间
微分时间越长,微分作用越强。(过大可能引起高频振荡)
3.2 实际 PD 控制器
微分增益:
微分增益越大,微分作用越理想。
(阶跃信号作用下,实际 PD 控制器的输出从最大值下降到微分输出幅度的 36.8%所经历的时间为微分时间常数
四、PID 运算规律
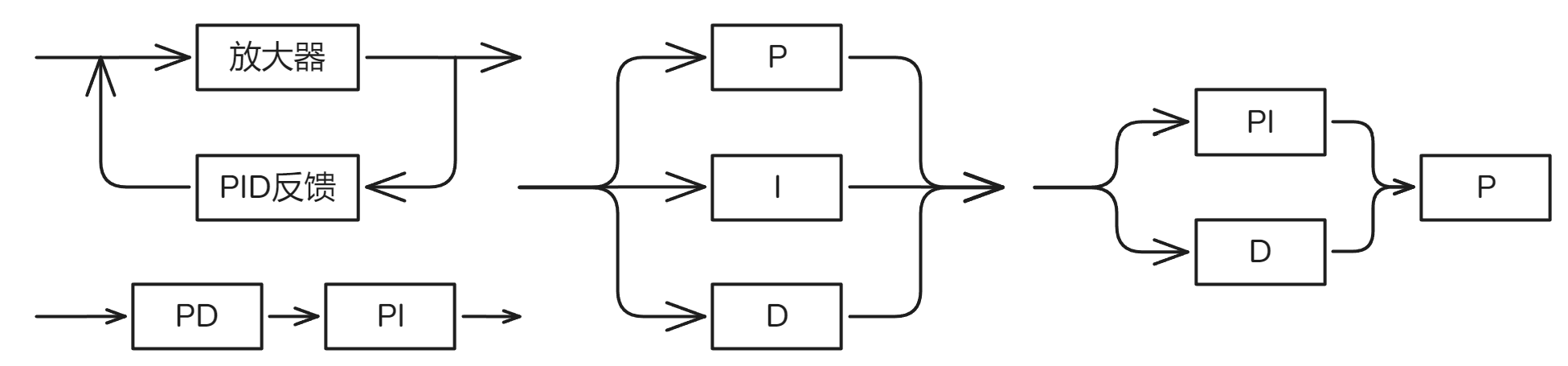
PID 控制器的构成
- 放大器和 PID 反馈电路:运算电路简单,相互干扰系数大
- PD 和 PI 电路串联:相互干扰系数较小,各级串联使得累计误差较大,精度要求较高
- P、I、D 电路并联:避免级间误差累计增大,实际参数发生改变
- PI 与 D 并联后再与 P 串联:避免级间误差累计增大,不存在变量相互影响
注意明确调节 PID参数时,参数的实际意义
比例/积分/微分增益还是比例度、积分时间、微分时间