数字控制器
Digital Controller
一、基本思想
- 将系统中被控对象及零阶保持器进行离散化,得到广义对象
- 根据系统的性能指标及约束条件,确定闭环期望传递函数
或误差传递函数 - 进一步得到数字控制器
- 将
写为差分方程的形式,得到控制算法
二、数字控制器一般形式
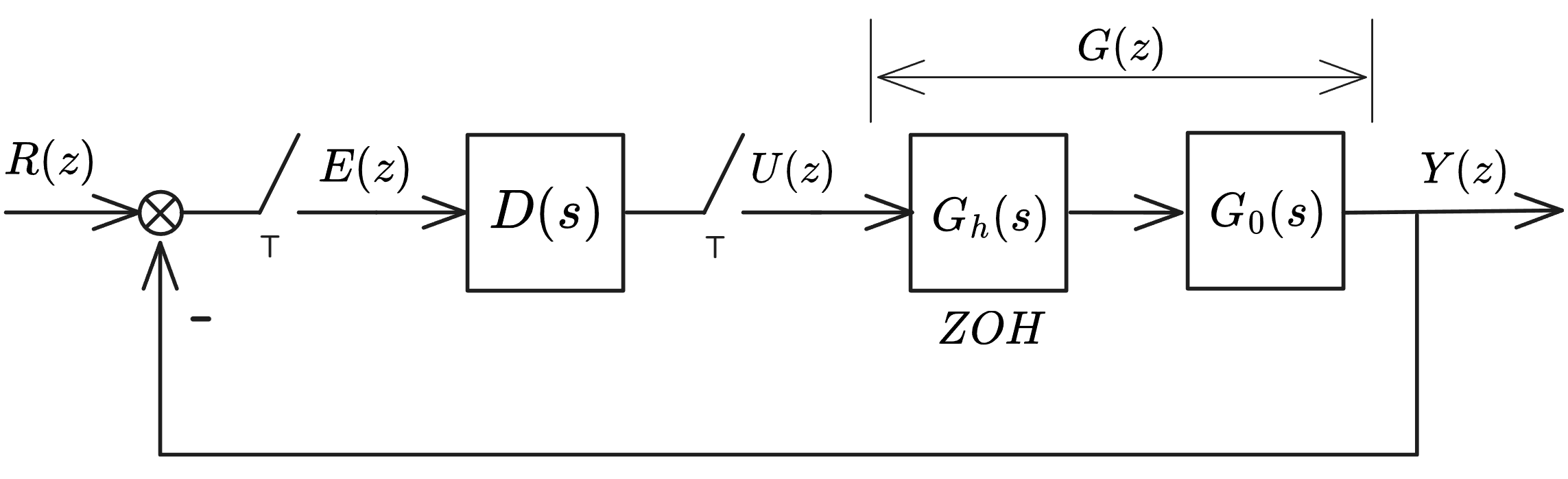
广义对象传递函数:
误差传递函数及误差序列:
闭环传递函数及输出序列:
数字控制器及控制序列:
Question
离散序列指的是
零阶保持器和惯性环节串联的 z 变换
Important
由于出现的频率十分高,甚至可以作为结论来简化计算量!
计算反复出现错误
- 符号
- 漏乘
,非常容易漏项!!!注意次数要相等 幂次相加,而不是 - 千万注意公式的记忆!!!注意是和零阶保持器相乘得到的结果
- 注意次数!!!注意
- 公式都是不带放大倍速的,实际做题要乘以系数!
1. 零阶保持器和一阶惯性环节串联 (一阶)
2. 零阶保持器和一阶惯性环节与一阶积分串联 (二阶)
3. 零阶保持器和二阶惯性环节串联(二阶)
数字控制器的可实现性
所谓控制器的可实现性,是指在控制算法中,不允许出现未来时刻的偏差值,即要求数字控制器